Optical Tweezers: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
No edit summary |
||
| Line 18: | Line 18: | ||
</ul> | </ul> | ||
</li> | </li> | ||
<li> | <li> | ||
Microscope Slide Mount | |||
<ul> | |||
<li>[[Slide Mount Apparatus]]</li> | |||
</ul> | |||
</li> | |||
<li> | |||
Stokes' Setup | Stokes' Setup | ||
<ul> | <ul> | ||
Revision as of 18:05, 21 August 2014
Optical Tweezers
Resources
- [1] Directions on how to use a QPD in an optical tweezer setup.
- [2] Here are some slide prepping instructions from Berkeley.
Our own setup
- Slide Setup
- Microscope Slide Mount
- Stokes' Setup
Using NI Vision Assistant
- [4] Image Acquisition/Saving Images
-
[5] How to track the microspheres in NI Vision Assistant using pattern matching.
- We actually tried both using pattern matching and brute force point and click methods. Neither worked very well, so we recommend using the QPD to get position measurements
Our calculations using Brownian Motion
-
2.56 micrometer spheres
- 4.6 mW Beam [6]
Calculating Trap Forces Using Stokes' Drag Force
- [7] iPython Calculations
-
Beam Power (mW) Escape Velocity (microns/second) Trap Force (pN) 5.5 20.57 0.44 8.5 33.49 0.72 11.7 40.00 0.86 15.3 62.60 1.34 19.0 84.71 1.82 23.0 110.77 2.38 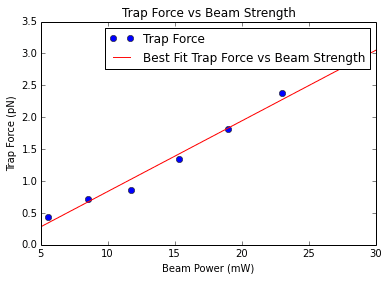
- A simple calculation would say that I need a 10 billion watt laser to achieve a 1 Newton trapping force. We should totally do that. The spheres would be so incredibly trapped.
